|
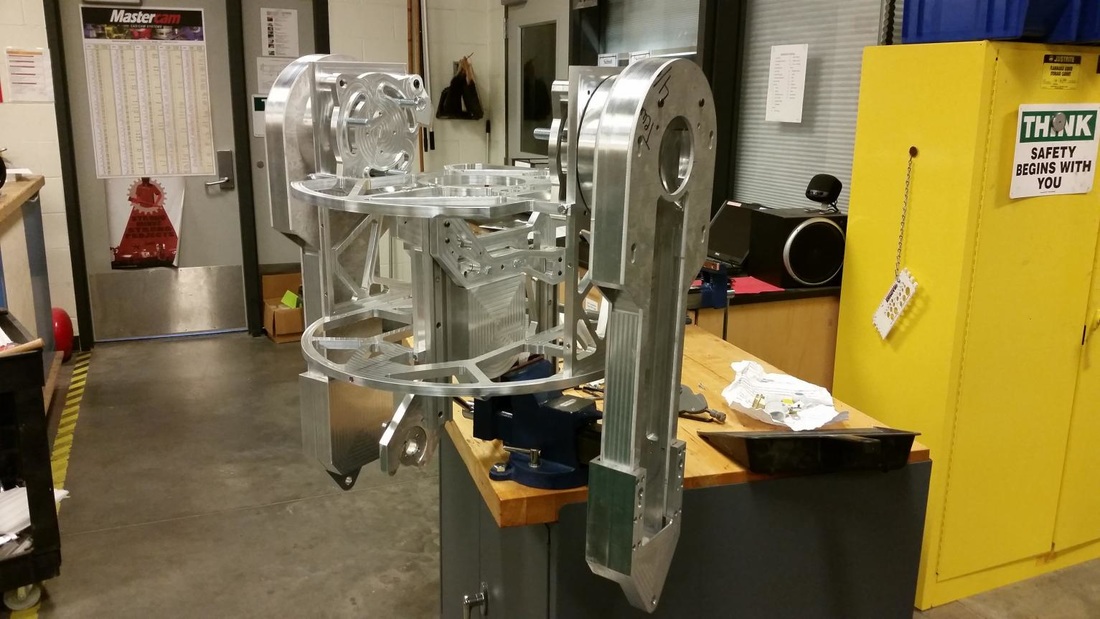
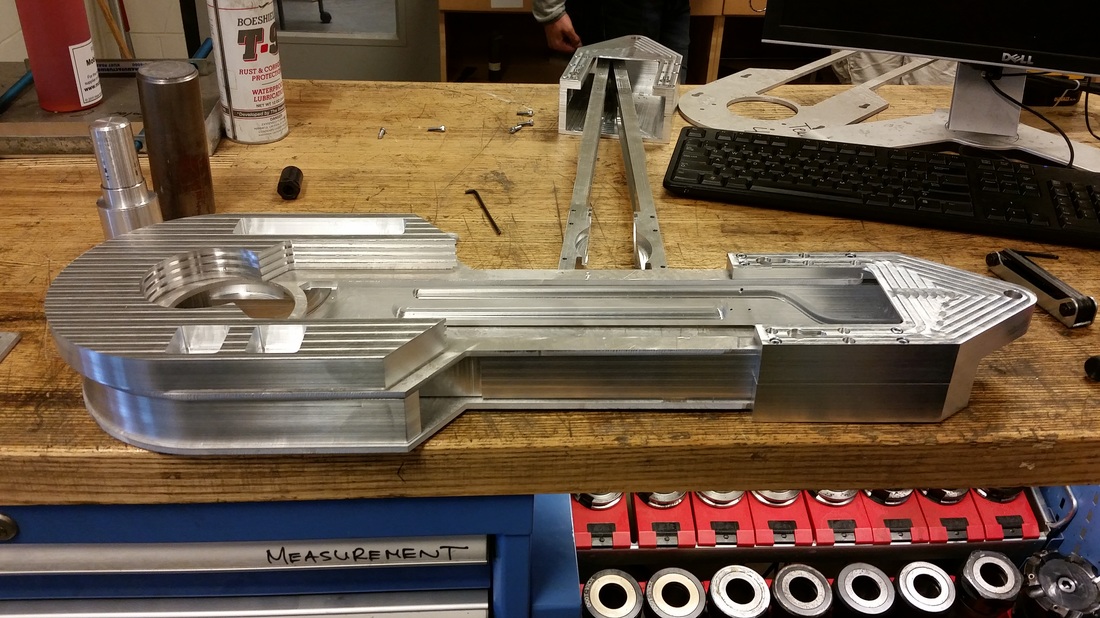
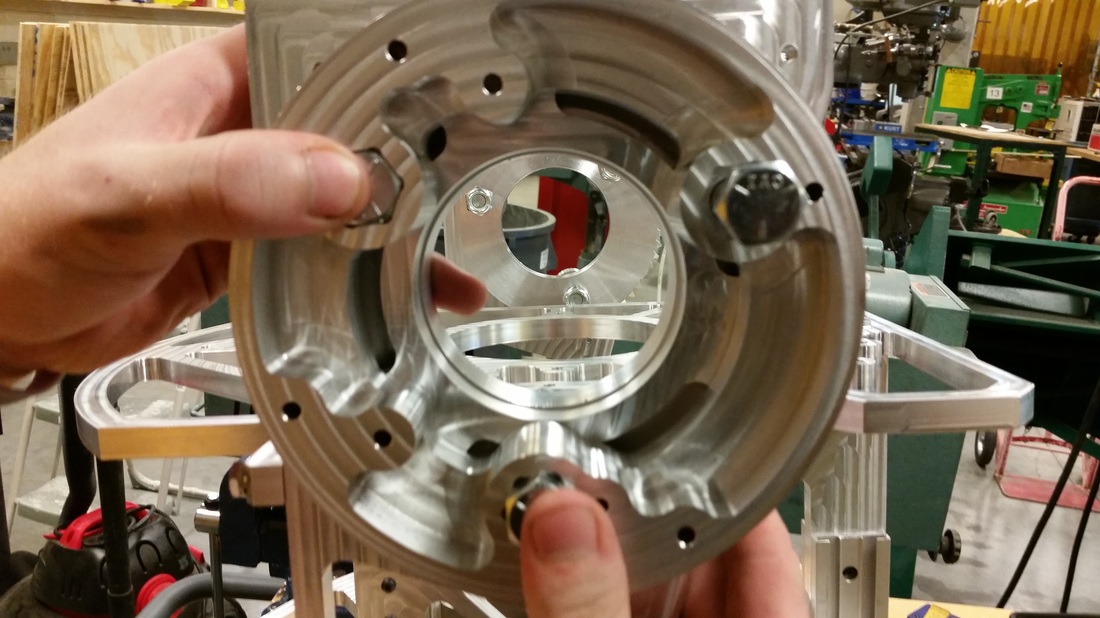
The legs of my droid are one of the most complete portions of my build. The legs must support the weight of the system in addition to any shock loads that are present as the droid drives around. In addition to the large loads that are seen in the legs, it was also decided to implement articulation in order to achieve the "2-3-2" transition.
As with the rest of the build, the legs are primarily made from 6061 Aluminum. The construction has 2 primary load bearing rails that also contain the follower rails for booster cover retraction. The next steps for the legs are to finalize and implement the booster and booster covers, machine the worm gear for the shoulder actuation, and to prep and paint. |